Abstract: Robot manipulation succeeds only when perception preserves the aspects of a scene that matter for action. Yet most robot learning pipelines still rely on visual encoders pre-trained for static recognition or vision-language alignment, leaving motion understanding to downstream policies....
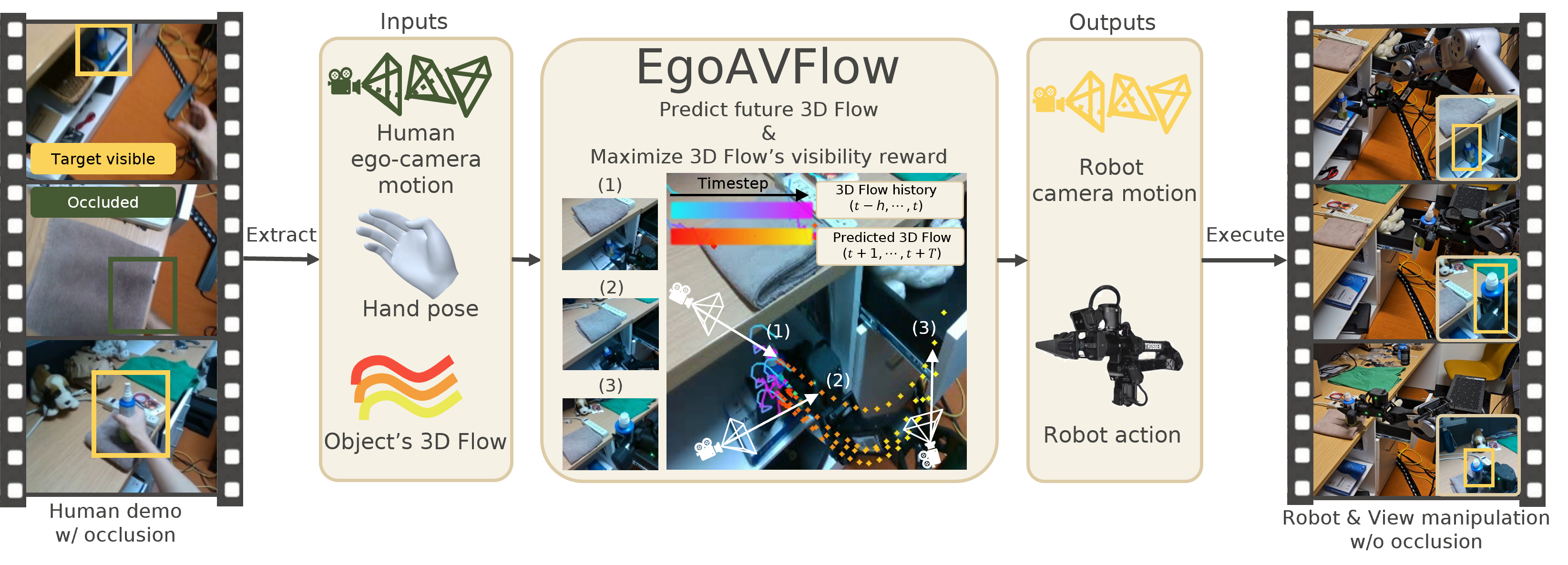
Abstract: Egocentric human videos provide a scalable source of manipulation demonstrations; however, deploying them on robots requires active viewpoint control to maintain task-critical visibility, which human viewpoint imitation often fails to provide due to human-specific priors. We propose Ego...
Abstract: Maximum entropy reinforcement learning (MaxEnt-RL) enables robust exploration, yet practical implementations often restrict policies to simple Gaussians. While recent MaxEnt-RL approaches incorporate expressive generative policies via weighted supervised learning, they use importance sa...
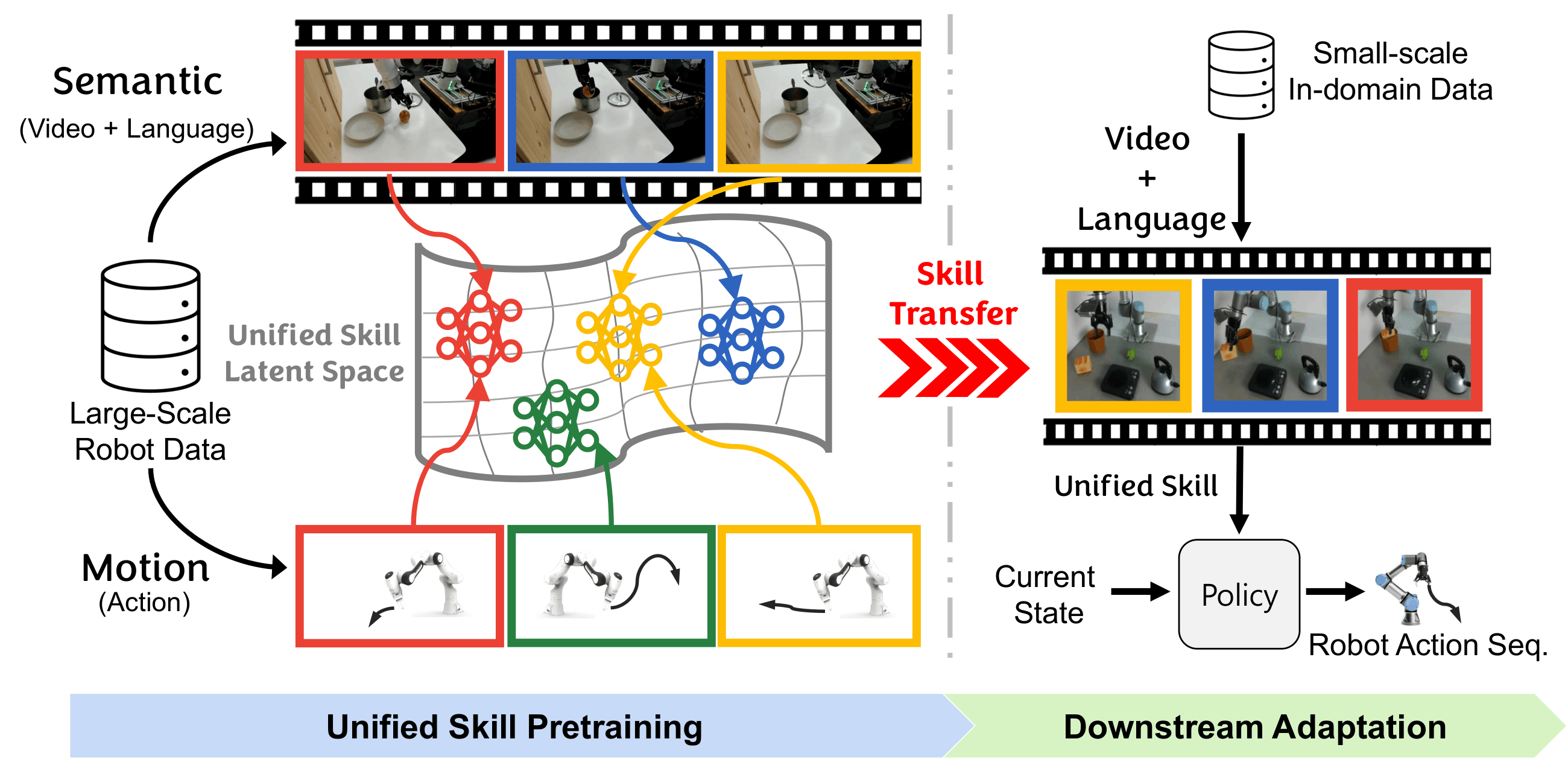
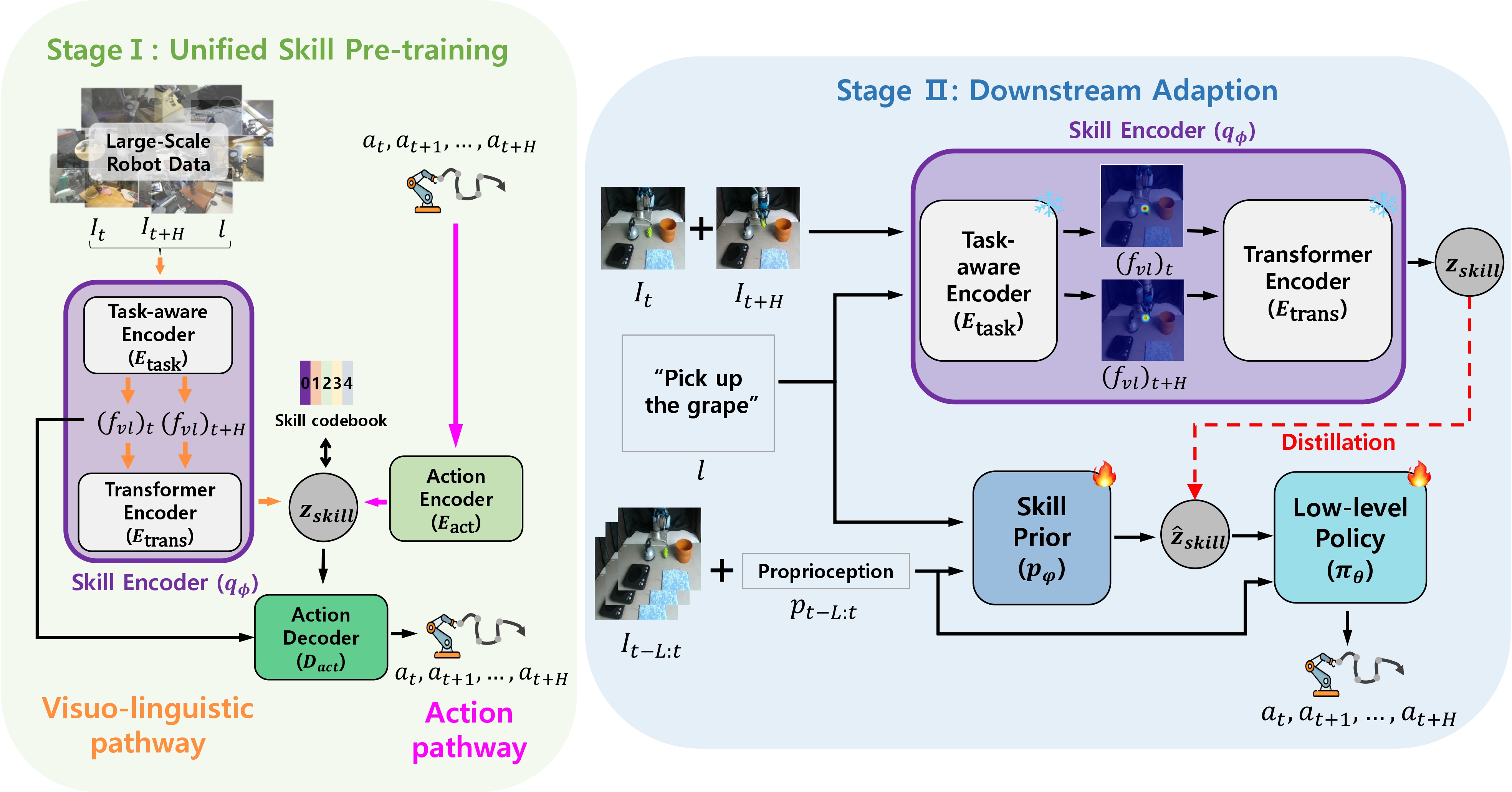
Abstract: Skill abstraction—the process of learning reusable and temporally extended behaviors—has emerged as a key paradigm for improving sample efficiency and generalization in robot learning. For efficient skill transfer to real robots, learned skills must generalize across tasks and domains, ...
Abstract: This paper presents Adaptive Whole-body LocoManipulation, AdaptManip, a fully autonomous framework for humanoid robots to perform integrated navigation, object lifting, and delivery. Unlike prior imitation learning-based approaches that rely on human demonstrations and are often brittle...
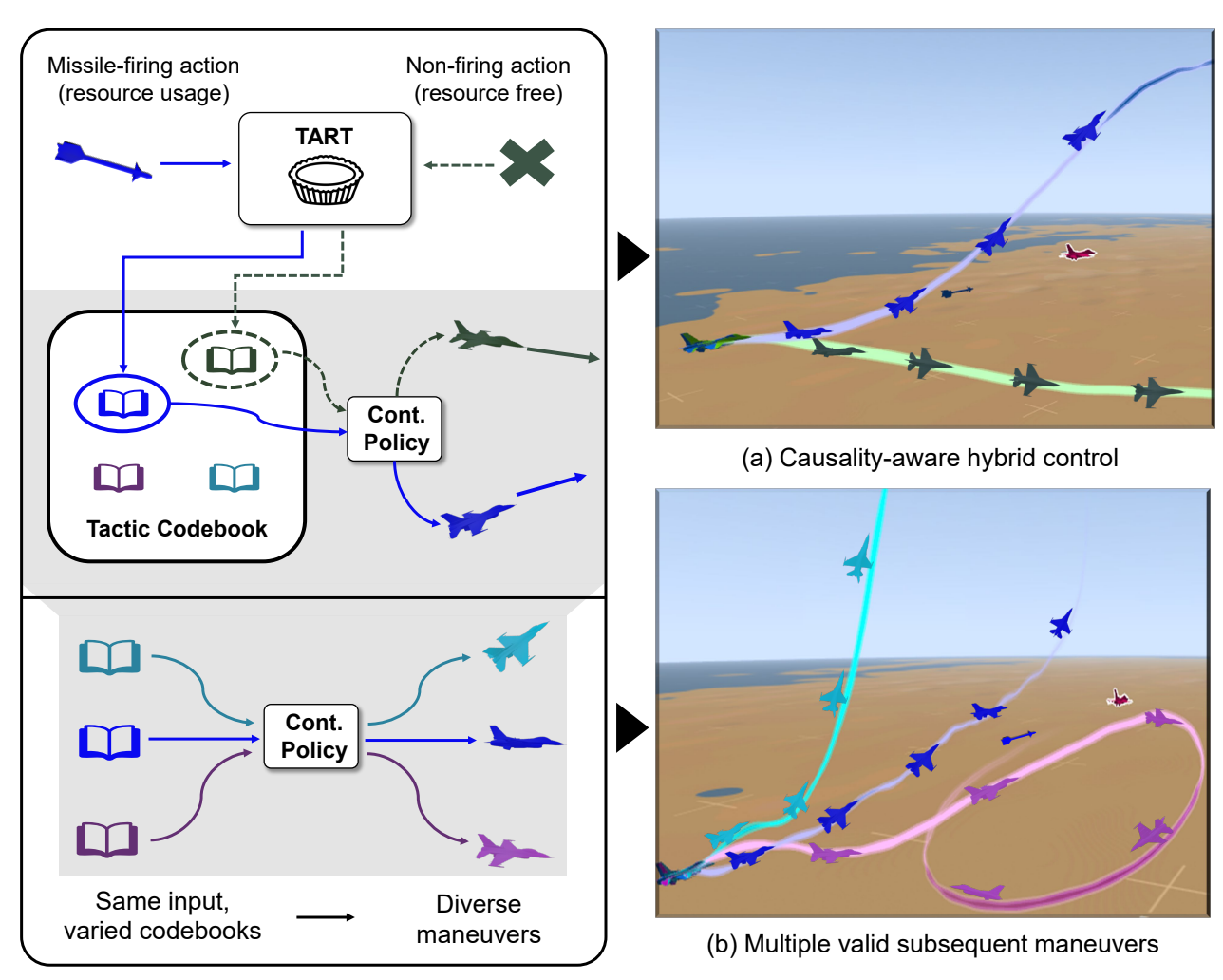
Abstract: Autonomous robotic systems should reason about resource control and its impact on subsequent maneuvers, especially when operating with limited energy budgets or restricted sensing. Learning-based control is effective in handling complex dynamics and represents the problem as a hybrid ac...
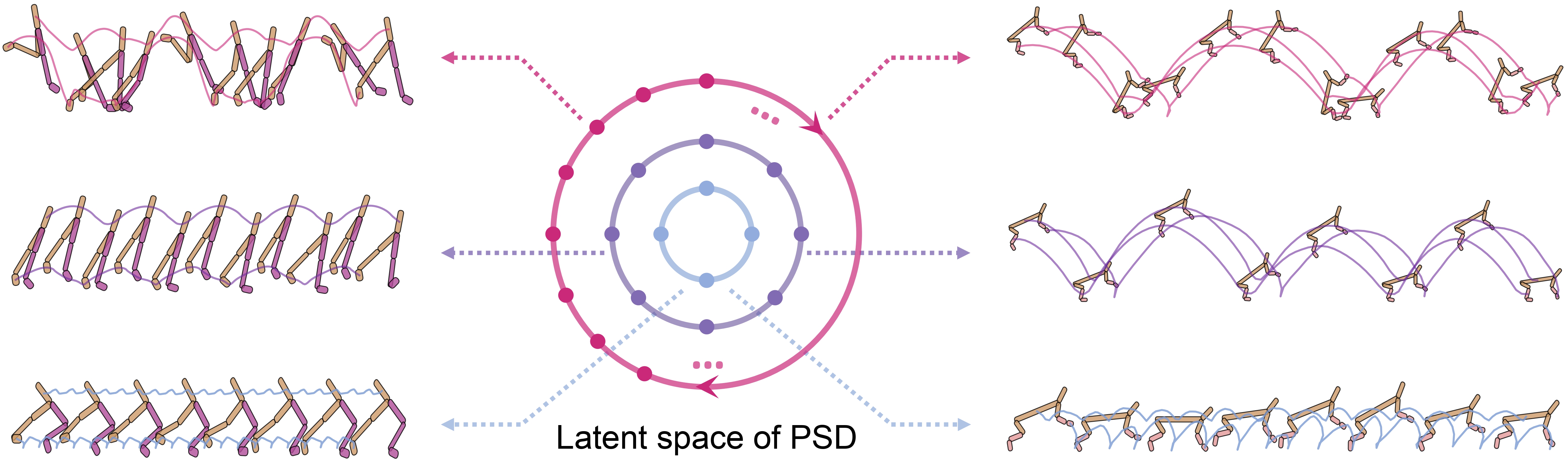
Abstract: Unsupervised skill discovery in reinforcement learning (RL) aims to learn diverse behaviors without relying on external rewards. However, current methods often overlook the periodic nature of learned skills, focusing instead on increasing the mutual dependency between states and skills ...
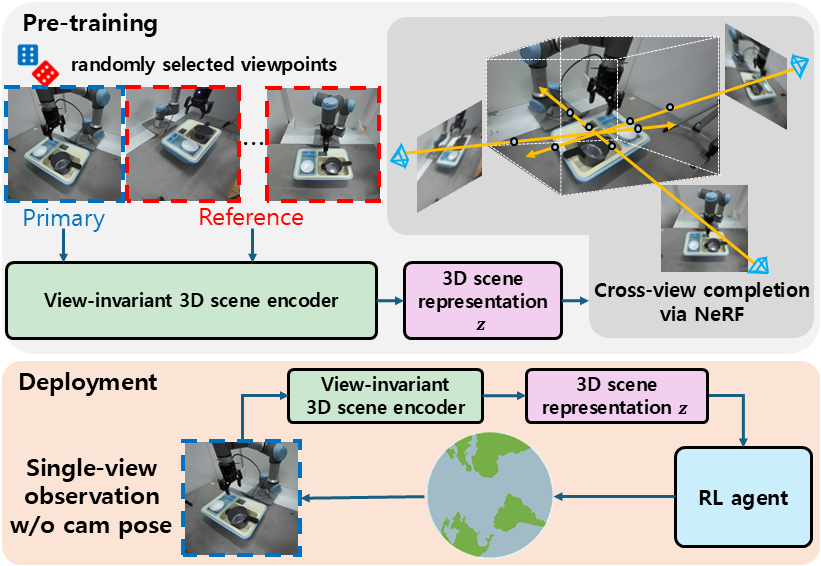
Abstract: Reinforcement learning (RL) has enabled robots to develop complex skills, but its success in image-based tasks often depends on effective representation learning. Prior works have primarily focused on 2D representations, often overlooking the inherent 3D geometric structure of the world...
Abstract: Skill abstraction, the process of learning reusable and temporally extended behaviors, has emerged as a key focus in robot learning for its potential to improve sample efficiency and generalization. However, existing methods exhibit complementary strengths and weaknesses, typically mode...
Abstract: Multi-task reinforcement learning (MTRL) offers a promising approach to improve sample efficiency and generalization by training agents across multiple tasks, enabling knowledge sharing between them. However, applying MTRL to robotics remains challenging due to the high cost of collecti...
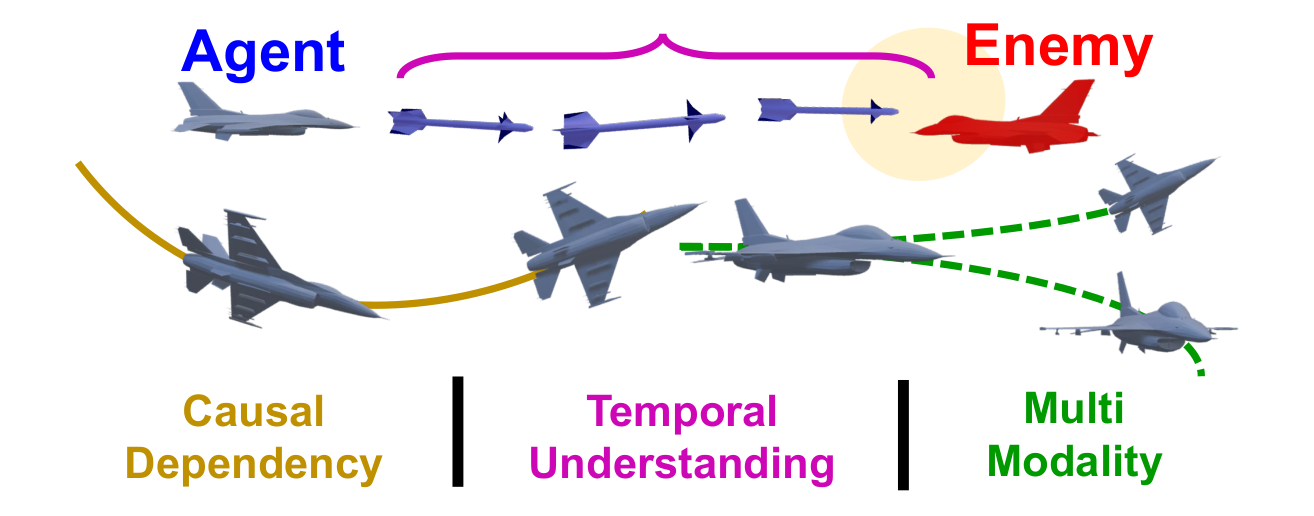
Abstract: A fully autonomous agent should reason about how to deploy limited resources effectively in dynamic and uncertain environments. Despite the focus on learning to act under such constraints, the tactical use of resources in fast-evolving scenarios (e.g., air combat) remains underexplored....
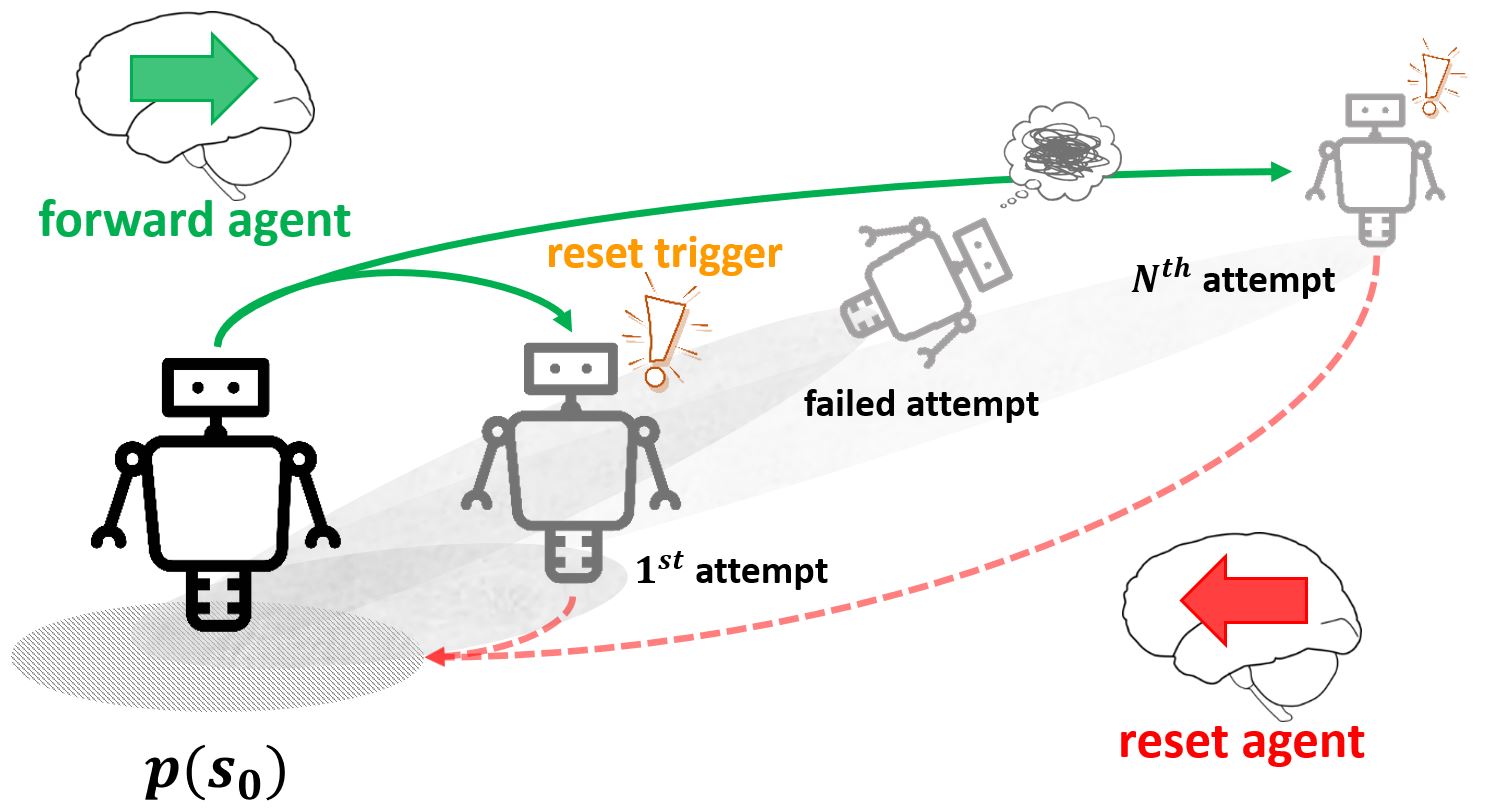
Abstract: Despite the remarkable success of reinforcement learning (RL) in mastering intricate skills through environmental interactions, the conventional assumption of easily accessible resets at the end of each episode poses challenges for autonomous learning in real-world scenarios. This assum...
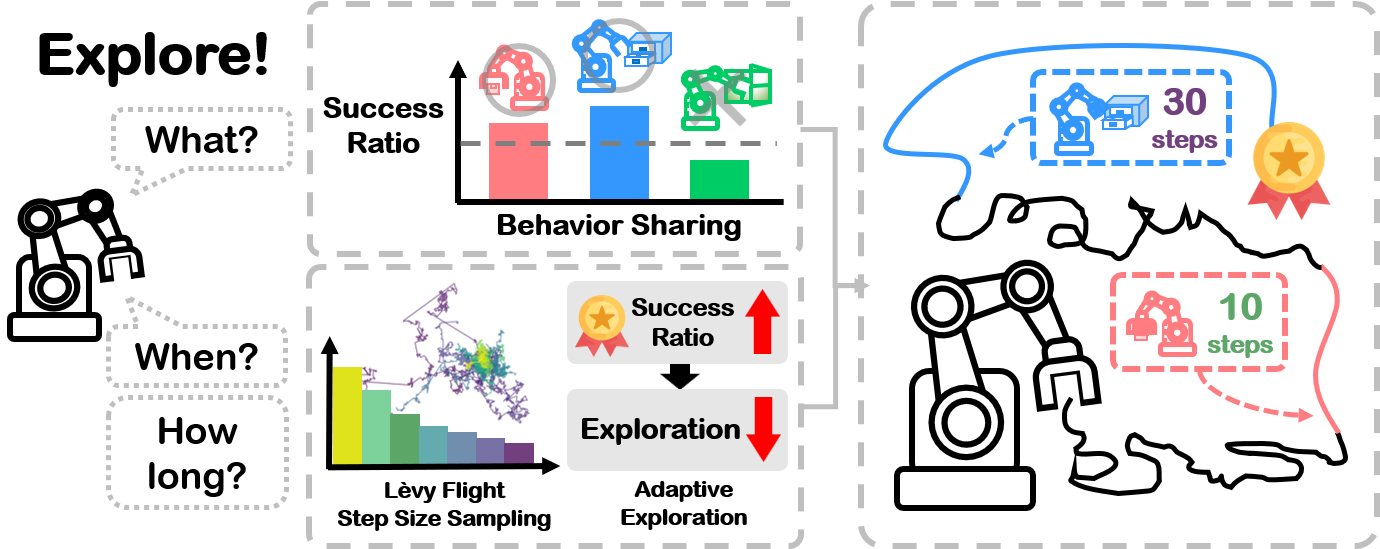
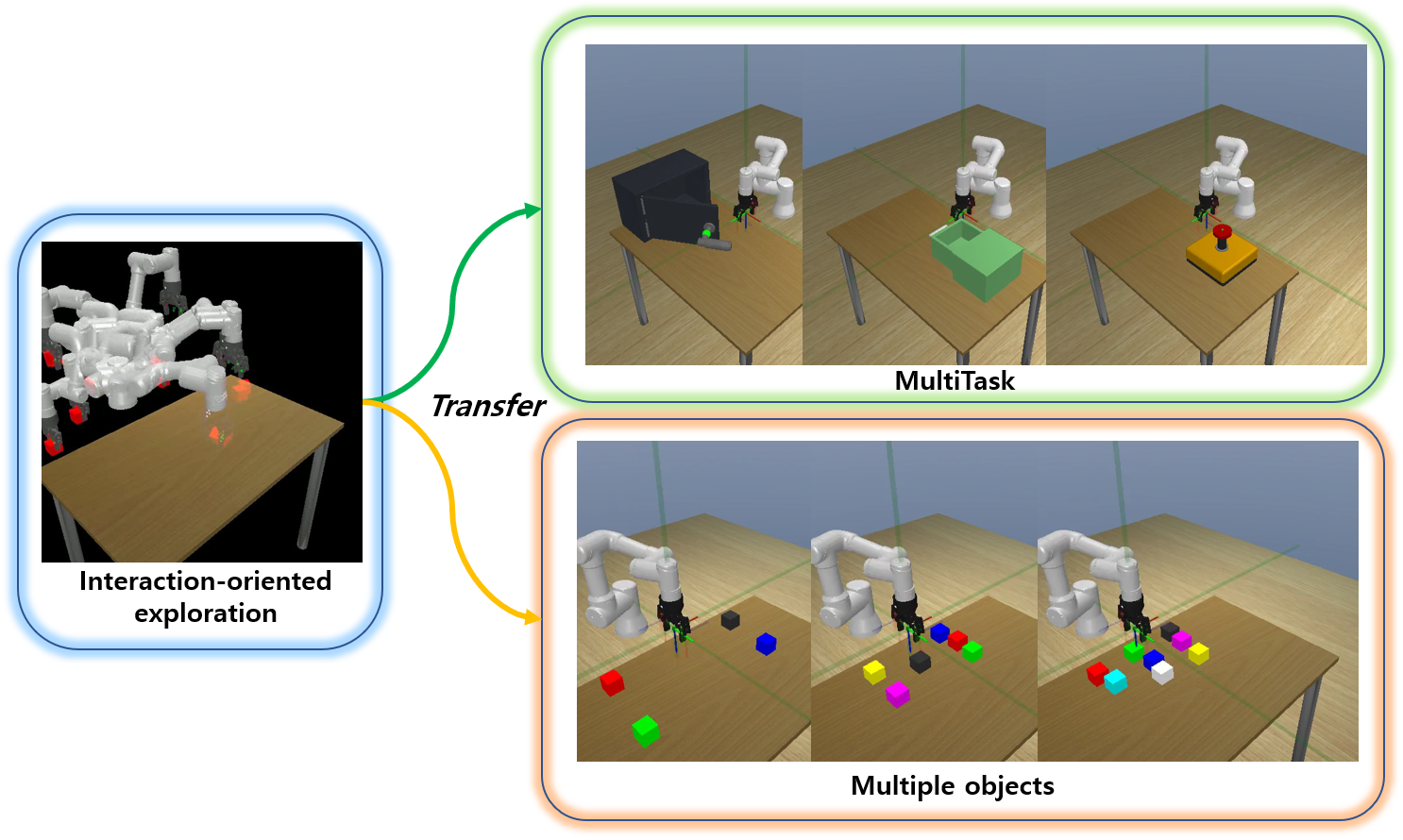
Abstract: Reinforcement learning (RL) often faces the challenges of uninformed search problems where the agent should explore without access to the domain knowledge such as characteristics of the environment or external rewards. To tackle these challenges, this work proposes a new approach for cu...
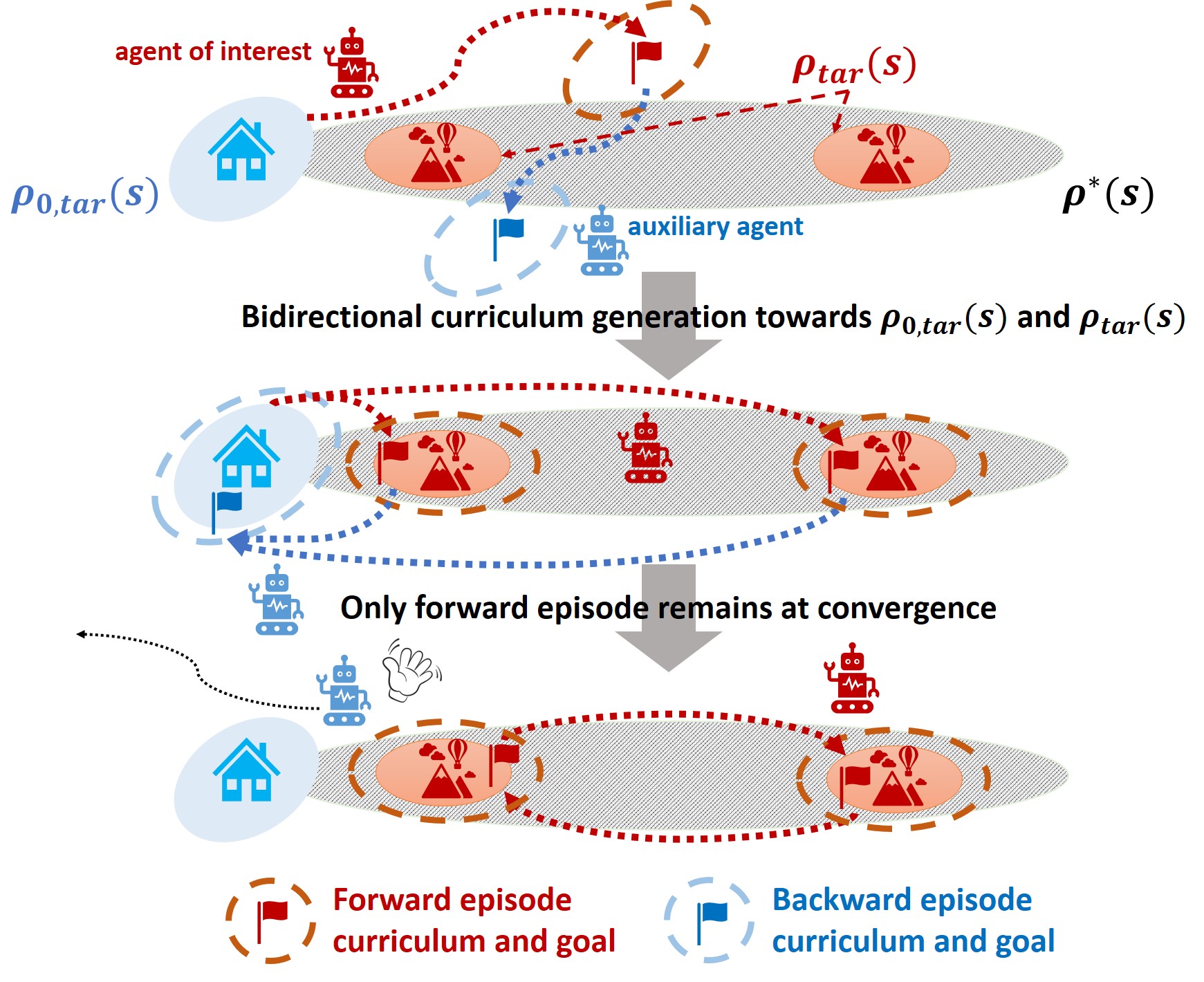
Abstract: Recent curriculum Reinforcement Learning (RL) has shown notable progress in solving complex tasks by proposing sequences of surrogate tasks. However, the previous approaches often face challenges when they generate curriculum goals in a high-dimensional space. Thus, they usually rely on...
Abstract: While reinforcement learning (RL) has achieved great success in acquiring complex skills solely from environmental interactions, it assumes that resets to the initial state are readily available at the end of each episode. Such an assumption hinders the autonomous learning of embodied a...
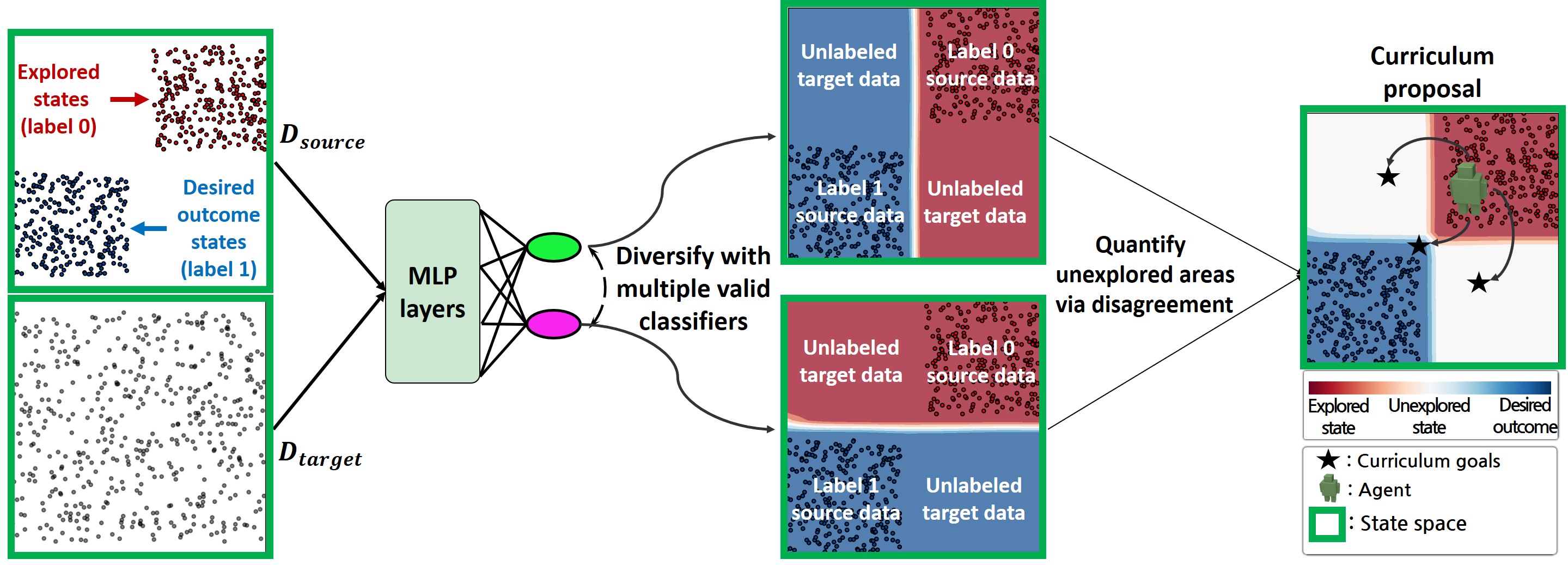
Abstract: Current reinforcement learning (RL) often suffers when solving a challenging exploration problem where the desired outcomes or high rewards are rarely observed. Even though curriculum RL, a framework that solves complex tasks by proposing a sequence of surrogate tasks, shows reasonable ...
Abstract: Robot manipulation succeeds only when perception preserves the aspects of a scene that matter for action. Yet most robot learning pipelines still rely on visual encoders pre-trained for static recognition or vision-language alignment, leaving motion understanding to downstream policies....
Abstract: Egocentric human videos provide a scalable source of manipulation demonstrations; however, deploying them on robots requires active viewpoint control to maintain task-critical visibility, which human viewpoint imitation often fails to provide due to human-specific priors. We propose Ego...
Abstract: Maximum entropy reinforcement learning (MaxEnt-RL) enables robust exploration, yet practical implementations often restrict policies to simple Gaussians. While recent MaxEnt-RL approaches incorporate expressive generative policies via weighted supervised learning, they use importance sa...
Abstract: Skill abstraction—the process of learning reusable and temporally extended behaviors—has emerged as a key paradigm for improving sample efficiency and generalization in robot learning. For efficient skill transfer to real robots, learned skills must generalize across tasks and domains, ...
Abstract: This paper presents Adaptive Whole-body LocoManipulation, AdaptManip, a fully autonomous framework for humanoid robots to perform integrated navigation, object lifting, and delivery. Unlike prior imitation learning-based approaches that rely on human demonstrations and are often brittle...
Abstract: Autonomous robotic systems should reason about resource control and its impact on subsequent maneuvers, especially when operating with limited energy budgets or restricted sensing. Learning-based control is effective in handling complex dynamics and represents the problem as a hybrid ac...
Abstract: Unsupervised skill discovery in reinforcement learning (RL) aims to learn diverse behaviors without relying on external rewards. However, current methods often overlook the periodic nature of learned skills, focusing instead on increasing the mutual dependency between states and skills ...
Abstract: Reinforcement learning (RL) has enabled robots to develop complex skills, but its success in image-based tasks often depends on effective representation learning. Prior works have primarily focused on 2D representations, often overlooking the inherent 3D geometric structure of the world...
Abstract: Skill abstraction, the process of learning reusable and temporally extended behaviors, has emerged as a key focus in robot learning for its potential to improve sample efficiency and generalization. However, existing methods exhibit complementary strengths and weaknesses, typically mode...
Abstract: Multi-task reinforcement learning (MTRL) offers a promising approach to improve sample efficiency and generalization by training agents across multiple tasks, enabling knowledge sharing between them. However, applying MTRL to robotics remains challenging due to the high cost of collecti...
Abstract: A fully autonomous agent should reason about how to deploy limited resources effectively in dynamic and uncertain environments. Despite the focus on learning to act under such constraints, the tactical use of resources in fast-evolving scenarios (e.g., air combat) remains underexplored....
Abstract: Despite the remarkable success of reinforcement learning (RL) in mastering intricate skills through environmental interactions, the conventional assumption of easily accessible resets at the end of each episode poses challenges for autonomous learning in real-world scenarios. This assum...
Abstract: Reinforcement learning (RL) often faces the challenges of uninformed search problems where the agent should explore without access to the domain knowledge such as characteristics of the environment or external rewards. To tackle these challenges, this work proposes a new approach for cu...
Abstract: Recent curriculum Reinforcement Learning (RL) has shown notable progress in solving complex tasks by proposing sequences of surrogate tasks. However, the previous approaches often face challenges when they generate curriculum goals in a high-dimensional space. Thus, they usually rely on...
Abstract: While reinforcement learning (RL) has achieved great success in acquiring complex skills solely from environmental interactions, it assumes that resets to the initial state are readily available at the end of each episode. Such an assumption hinders the autonomous learning of embodied a...
Abstract: Current reinforcement learning (RL) often suffers when solving a challenging exploration problem where the desired outcomes or high rewards are rarely observed. Even though curriculum RL, a framework that solves complex tasks by proposing a sequence of surrogate tasks, shows reasonable ...